

KOOVのロボットプログラミング
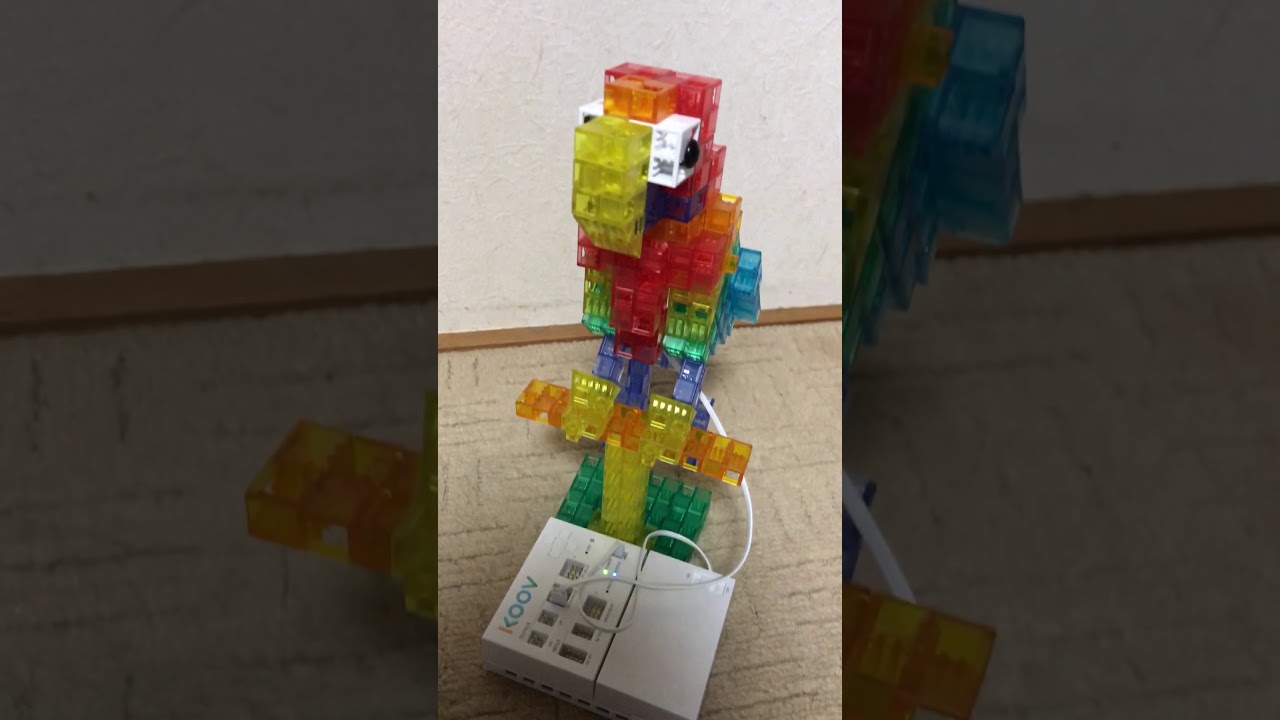
ソニーKOOVで作成した、オウムの首の向きが状況によって変わる仕組み動画です。
オウムの首の根本には、左右に首を動かすためのサーボモーターが取り付けられています。
首を左右に動かすのは、手前にあるコアと呼ばれる白いボックスで制御します。
このコアとサーボモーターの制御をするケーブルを接続します。
コアにある1つのボタンを押すと、左か右のどちらかにオウムの首がランダムに動きます。
一定ではないため、ボタンを押してみたいと、どちらに首が動くのかがわからないのがおもしろいポイントです。
これらを応用すれば、じゃんけんゲームやランダムに動くロボットを作ることが可能です。
