

アーテックロボのロボットプログラミング
アーテックロボを使って、昔の茶運びからくり人形の動作を一部再現した動画です。
昔の茶運び人形は江戸時代に、ゼンマイや歯車などで作られていました。
茶碗を置くと、人形が動き出して茶碗を取ると止まります。
再び茶碗を置くと180度向きを変えて、もとに戻る仕組みです。
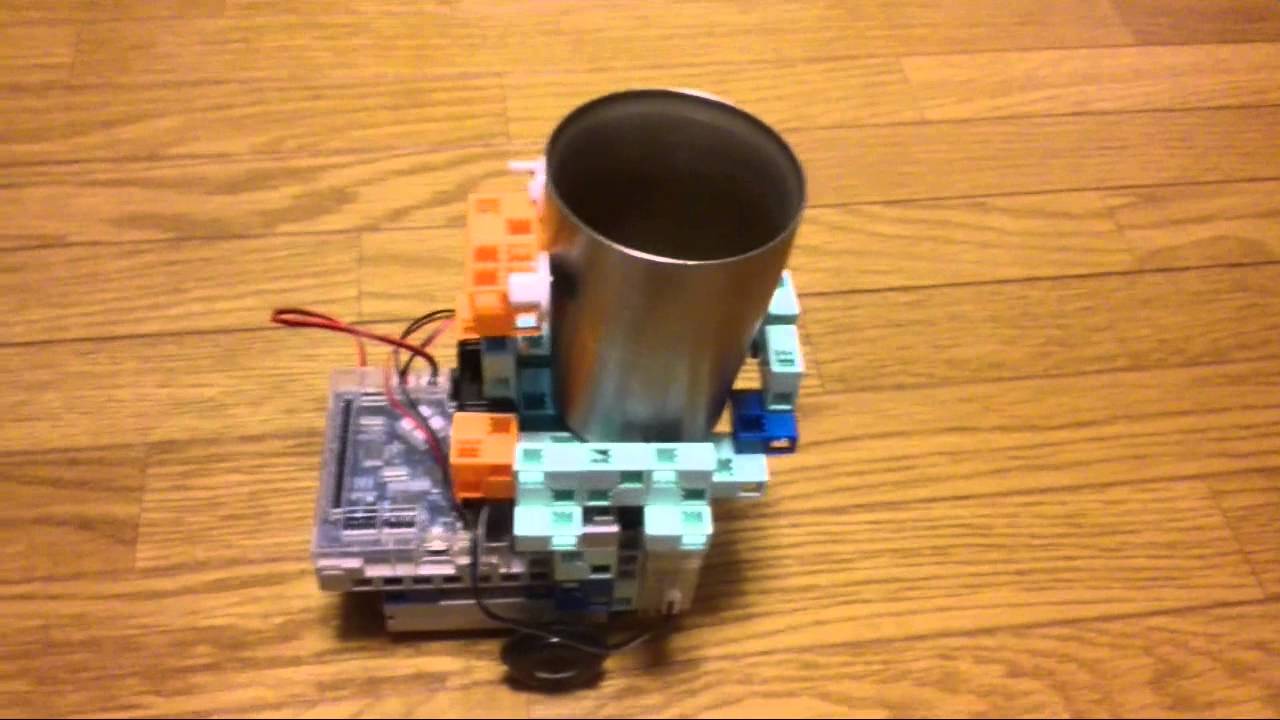
ロボットは、光センサーまたはタッチセンサーにコップを置くと感知して走り出します。
一定距離を走ったあと止まり、コップを取ると180度向きを変えて、もとに戻るようにプログラムされています。
制御はStuduinoという基盤が使われ、Arduino IDEのアプリを使って簡易的なプログラミングができます。
